机器人有望跨越仿真现实鸿沟

一个中型犬大小的“ANYmal”四足机器人。图片来源:《自然》网站
今日视点
奔跑、攀援、摔倒、爬起,对于野外动物来说,这些动作是与生俱来的本能。我们人类出生后,掌握这些动作的时间相对慢一些或者需要训练,但作为弥补,我们拥有非常精细的手部运动技能,可以从容操作各种工具。
而众所周知,无论是优雅地行走还是自然地抓取,机器人在这方面的表现一直不尽如人意,步态运动的协调性和机器手的灵巧度一直是业界难题。
但现在,情况正一点点发生变化。
据日前英国《自然》新闻与观点文章称,历经几十年,机器人终于在机器学习的帮助下,开始掌握自然地行走、奔跑和抓物的技能了。这一突破,被认为拉开了具有“物理灵活性”的人工智能时代的序幕,同时,开启了一个“机器人自主时代”。
机器人“活得”比你想的要难
一个机器人的“生命”,是从仿真开始的。
机器人工程师们首先会看引导软件在虚拟世界中是否表现良好,如果令人满意,这个软件就会被放进机器人体内,应用于物理世界。
但在物理世界中,看似很小的障碍都会让机器人陷入困境,他们不可避免地遭遇“真实世界”带来的无数巨大难题——那些无法预测的表面摩擦力、结构柔性、振动,以及机器人自身的传感器延迟、致动器转化不良等等,这一连串障碍,几乎没有一个能用数学模型提前假设。
过去几十年来,工程师其实也在不断尝试通过基于预测性数学模型(经典控制论)的软件,去引导机器人进行肢体活动。然而,这个方法在引导机器人肢体执行行走、攀爬和抓取不同形状物体这类极为简单的任务时,被证明无效。
机器人在仿真环境中即使再应对自如,进入真实的物理世界,也会如懵懂孩童般跌跌撞撞。
机器学习或能弥合仿真与现实差距
当人们已习惯机器人数十年如一日的蹒跚学步,科学家们却突然点亮了希望。
日前,苏黎世联邦理工学院机器人系统实验室团队在《科学⋅机器人学》上发表最新论文,给出了新证据表明,运用数据驱动法设计的机器人软件,有很大希望解决机器人学和人工智能研究长期面临的巨大难题——仿真与现实之间的差距。
团队演示的方法是将经典控制论与机器学习技术相结合。他们首先设计了一个四足机器人的传统数学模型,并给机器人起名“ANYmal”。接下来,再从引导机器人四肢运动的致动器中收集数据,数据输入多个人工智能神经网络系统,从而建立了第二个模型。
这个机器学习模型,就可以自动预测“AMYmal”机器人的肢体运动。经过训练的神经网络,只要插入第一个模型中,就可以在电脑上仿真运行这个混合模型。
团队发现这种利用数据驱动法设计的软件,提高了机器人的运动技能——它速度更快,动作也更精准。而且先将运动策略在仿真器中优化,再转入机器人体内在物理世界进行测试,最后机器人的表现,竟然和仿真表现一样好。
混合模型是变革的第一步
这一成就,被认为是机器人及人工智能的一项重要突破,其预示着,曾经不可逾越的仿真与现实之间的差距正在被消弭。
其也预示着新一轮人工智能的重大变革,而混合模型,正是这场变革的第一步。之后,所有的分析模型都将面临“下岗”。
通过机器人在现实环境中收集到的数据,训练机器学习模型——这一方法也被称为“端到端训练”(end-to-end training)。其正缓慢但坚定地照进现实,在诸如关节式机械臂、多指机械手、无人机,甚至是无人驾驶汽车中得到应用。
或许不久的将来,机器人工程师将不必再“告诉”机器人如何走路、如何抓取,而是让机器人利用自身收集得来的数据,进行自我学习。
不过,现阶段其也存在一定挑战。最重要的就是要优化可扩展性,以确定“端到端训练”是否可以扩展用于引导拥有几十个致动器的复杂机器,譬如类人机器人、制造工厂、智能城市这一类大型系统,进而用数字技术帮助人类切实地提高生活质量。
《自然》观点文章称,对人类来说,当脑中对未来行动的思路越清晰,这个人的自我意识能力也就越高。现如今,机器人已经在学习的路上更进一步,其不仅是一次具有实际意义的突破,让某些工程性劳动得以解放,还标志着科学家们已开启了“机器人自主时代”。(科技日报北京7月9日电)


- 01-11全球最受赞誉公司揭晓:苹果连续九年第一
- 12-09罗伯特·莫里斯:让黑客真正变黑
- 12-09谁闯入了中国网络?揭秘美国绝密黑客小组TA
- 12-09警示:iOS6 惊现“闪退”BUG
- 11-18LG新能源宣布与Bear Robotics达成合作,成为
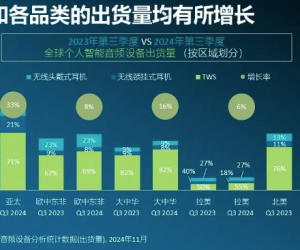
- 11-18机构:三季度全球个人智能音频设备市场强势
- 11-18闲鱼:注册用户过6亿 AI技术已应用于闲置交
- 11-18美柚、宝宝树回应“涉黄短信骚扰”:未发现
- 11-01京东七鲜与前置仓完成融合










 粤公网安备 44060402001498号
粤公网安备 44060402001498号